Есть на Земле народы, которые в своей цивилизации не знали колеса. Это некоторые племена Тибета, джунглей Амазонии. Кажется, древние ацтеки тоже не признавали колеса. Потому что географические условия тех местностей, где обитали эти люди, исключали возможность использования принципа качения. Колесу нужна дорога. В горных отрогах, болотах, непроходимых лесах телега не поедет. Тут требуется другой метод передвижения физических тел, например, шаг.
Недаром один их величайших писателей-фантастов нашего века Герберт Уэллс посадил своих марсиан в "Войне миров" на ходульные машины о трех ногах. По мысли фантаста марсиане, стоящие на более высокой ступени развития, чем земляне, описанные в романе, должны были выбрать именно шаг как наиболее совершенный способ передвижения.
Или возьмем самоходный аппарат "Луноход-1", который доставила на поверхность нашей планеты-спутника в ноябре 1970 года автоматическая станция "Луна-17". Да, в его конструкции было применено колесо, точнее, восемь колес, по четыре с каждой стороны аппарата. Но не был отвергнут и шаг - вспомните по телевизионным репортажам, как машина преодолевала встречавшиеся на ее пути препятствия: она выставляла вперед колесо, вроде бы ощупывая местность, как человек ногой. Она "поджимала" ногу, когда попадала на крупный камень. Именно это сочетание двух принципов движения и сделало механизм удивительно проходимым.
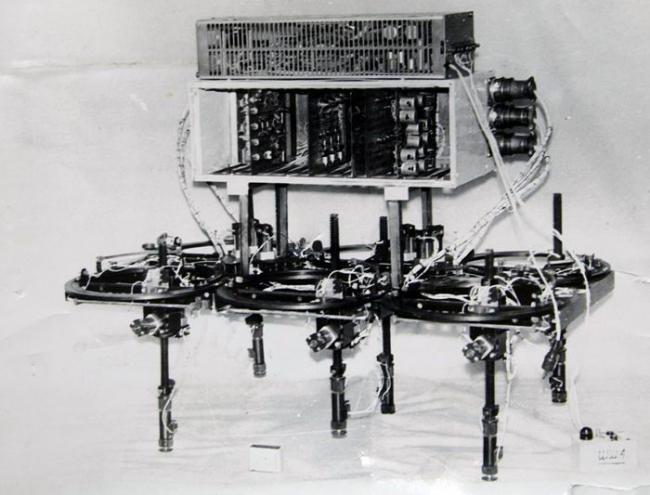
Убежден был в актуальности и перспективности робототехнических систем с шагающими машинами и Анатолий АндреевичШибанов, затевая в начале 80-х годов сложную и необычную работу. Целью его было создание научно обоснованной методики исследования, выбора конструктивных параметров и систем управления высокоманевренных шагающих машин с использованием модульного принципа. А практически опыты Шибанова вылились в создание им этакого шагающего уэллсовского механизма, только не о трех ногах, а о четырех, пяти, шести, и не ногах, а точнее - модулях, законченных технических узлах, в которых присутствовали металлические конечности. Соединенные воедино, несколько модулей являли собой совершенный шагающий механизм, который Шибанов предполагал для использования в труднопроходимых местах, в неблагоприятных условиях, где присутствие человека нежелательно или невозможно.
Работы подобного плана проводились в нашей стране и ранее, в частности, в Институте машиноведения им. А.А.Благонравова АН СССР, где в 1984 году Анатолий Андреевич и защитил успешно на своих машинах кандидатскую диссертацию. Но кировским ученым применены в исследованиях и внедрены в практику кой-какие новинки. Главным образом это касается системы управления: каждому конструктивному модулю-движителю в аппарате Шибанова соответствует модуль-блок системы управления. Получалось, что каждый из узлов машины "думает" сам по себе, что повышало маневренность, делало оптимальной подвижность конструкции. И конечно, были предложены оригинальные схемы самих модулей.
Забегая вперед, можно сказать, что Анатолий Андреевич защитил свое шагающее средство авторским свидетельством. А раньше совместно с В.В.Суминым, В.В.Куклиным, В.Н.Владимировым, А.Л.Носовым и Н.М.Татариновым он получил авторское на устройство для управления асинхронным короткозамкнутым двигателем, использованным в последующей полуфантастической, но как оказалось, такой функциональной разработке.
Машина кировского ученого могла менять характер походки, убыстрять или замедлять движение, разворачиваться, пятиться назад. Причем траекторию шагающего механизма можно было формировать двояко: программно, когда необходимые параметры движения программировались и вводились в систему управления предварительно, и адаптивно, когда эти параметры вводились в процессе движения.
В общем, создал Анатолий Андреевич Шибанов шагающего робота, способного обучаться в процессе своей деятельности и имеющего немалые перспективы. Между прочим, когда произошло несчастье в Чернобыле, в некоторые труднодоступные места аварии, куда не проходила колесная техника, вполне мог бы проникнуть механизм, созданный в Кирове. А посылали людей...
Разработка Шибанова - это техника завтрашнего дня. Она еще будет востребована. И нельзя не отметить в этой связи, что не один Анатолий Андреевич в институте задумывался над робототехническими системами. Эта тематика получила развитие и на кафедре электропривода и автоматизации промышленных установок, образовавшейся в 1972 году из предметной комиссии с тем же названием. Руководить ею стал кандидат технических наук М.В.Коковихин, впоследствии передавший бразды правления своему коллеге Н.П.Протасову. И в том же 1984 году, когда Шибанов демонстрировал оппонентам во время защиты диссертации в московском Институте машиноведения свою необычную конструкцию, в КирПИ при кафедре электропривода появилась специализация по робототехнике. Через три года это направление перерастет в специальный факультет переподготовки инженерных кадров по новым перспективным направлениям науки, техники и технологии, и специализацию передадут сюда. Слушателям будут читать курс лекций по теме "Управление робототехническими системами".
Конечно, эти конструкции ни внешне, ни по замыслу их создателей не встают в один ряд с творением А.А.Шибанова. У них совершенно другое предназначение. Промышленные роботы - это программируемые устройства, призванные выполнять несколько или даже одну техническую операцию на конвейере или в цехе, но выполнять ее гораздо быстрее и качественнее, чем это бы делал человек. Надо отдать должное кафедре электропривода, в те годы "повернувшейся лицом" к робототехнике, ныне покорившей весь индустриальный мир.
Из книги В.Шишкина «ВятГУ: страницы биографии», 1998г.



